728x90
우분투 (소스) — ROS 2 문서: Humble documentation
Ubuntu (source) — ROS 2 Documentation: Humble documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Iron. Ubuntu (source) The current Debian-based target platforms for Humble Hawksbill are: Tier 1: Ubuntu Linu
docs.ros.org
지역설정
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8셋 소스
sudo apt update && sudo apt install curl gnupg2 lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
ROS2 apt 저장소 추가
ubuntu universe 레포지토리 활성화 확인
sudo apt install software-properties-common
sudo add-apt-repository universeROS 2 GPG 키를 추가
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg소스 목록에 리포지토리를 추가합니다
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
공통 패키지 설치
sudo apt update && sudo apt install -y \
python3-flake8-docstrings \
python3-pip \
python3-pytest-cov \
ros-dev-tools우분투 20.04 용
python3 -m pip install -U \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-import-order \
flake8-quotes \
"pytest>=5.3" \
pytest-repeat \
pytest-rerunfailuresROS2 코드받기
sudo apt install ros-foxy-desktop
작업영역을 만들고 모든 리포지토리 복제
mkdir -p ~/ros2_humble/src
cd ~/ros2_humble
vcs import --input https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos srcROSDEP을 이용해 종속성설치
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"
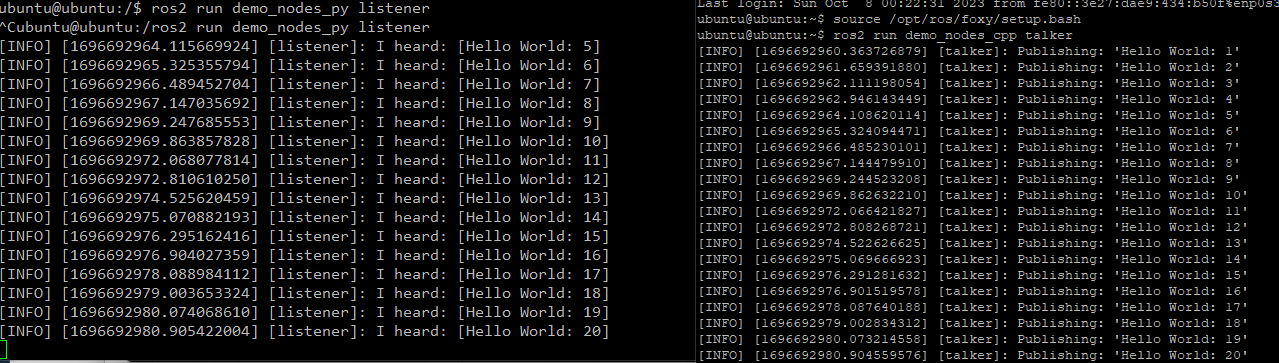
마지막으로 설치확인
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_cpp talker
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_py listener
리스너와 토커를 동시에 실행하여 설치여부를 확인할수있다
728x90
'ROS2' 카테고리의 다른 글
| ROS2 개발에 필요한 툴 설치 (1) | 2023.10.08 |
|---|---|
| ubuntu에서 삼바 환경 세팅 (0) | 2023.10.08 |
| VM virtualbox 우분투에서 putty를 사용하기 위한 환경 셋팅 (0) | 2023.10.07 |
| 우분투 오류 is not in the sudoers file. This incident will be reported. (sudo 명령 사용불가) (0) | 2023.10.07 |
| VM Virtual box에서 리눅스 22.04 터미널이 켜지지 않을때의 해결법 (1) | 2023.10.07 |